

Un dinosaurio sobre una trotadora podría demostrar si en realidad movían la cabeza como hoy lo hacen gallinas y palomas, sus descendientes. Eso es lo que quiere probar Bruno Grossi, biólogo, académico del Departamento de Ingeniería Mecánica de la Facultad de Ciencias Físicas y Matemáticas (FCFM) e investigador del AMTC y FabLab U. de Chile.
El terópobot es la segunda etapa de la investigación de Grossi, centrada en la biomecánica y que comenzó con un experimento en el que instaló una cola a un pollo, cambiando su centro de masa y demostrando cómo habrían caminado los dinosaurios (por lo que ganó un premio IG Nobel en 2015).
“Mi interés básico tiene que ver con la biomecánica animal, cómo se mueven los animales, cómo saltan, corren, trepan, nadan, vuelan, pero estudiado con herramientas ingenieriles, la física newtoniana, la matemática, con un punto de vista biológico adaptativo. Traté de entender cómo se movía la pata de un tiranosaurio rex, por ejemplo, y para eso utilicé a sus tataranietos, que son las aves, y a una gallina le cambié el centro de masa con una cola artificial, que se la puse durante toda la vida y caminó diferente a las gallinas normales, más similar a lo que pensamos caminan los dinosaurios, es decir, movió mucho más el fémur”, explicó el investigador.
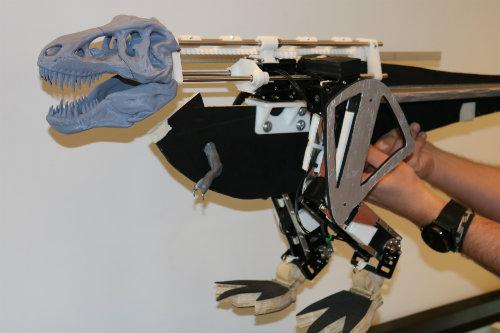
Su actual experimento ya no involucra a un animal vivo, sino una réplica robotizada para probar si el cabeceo que tienen algunas aves al caminar (como las gallinas y palomas), también pudo ser una característica compartida con sus gigantes ancestros. “Pero nunca hemos concebido -los biomecánicos, paleontólogos o gente que hace películas- que los dinosaurios terópodos, como el velociraptor, hicieran el cabeceo cuando caminaban”, dijo.
Hay una hipótesis que dice que lo hacen por un razón visual, porque no pueden mover mucho los ojos y mantienen su mundo estable mientras caminan, pero Grossi indicó que además de eso, el cabeceo aumenta la eficiencia locomotora. Las aves podrían hacer el cabeceo en cualquier parte del ciclo locomotor, pero lo hacen exactamente cuando tienen que tirar la pierna hacia adelante, por lo que podrían hacerlo porque es más eficiente.
“Las aves se ayudan tirando la cabeza hacia delante para no tener que hacer tanta energía con las patas para dar el siguiente paso”, detalló Grossi.
Ingeniería y biología unidas
El terópobot ya camina y mueve la cabeza y antes de fin de mes debería estar sobre la trotadora. “Lo que voy a hacer es medir la potencia de los motores todos juntos cuando camina sin cabeceo, y la compararlo cuando la hago mover la cabeza. Voy a poder comparar si efectivamente se reducen los costos de transporte, cuánta energía gasta el robot para moverse 1 kilómetro con y sin cabeceo. Voy a ver si es mayor, igual o menor para poder rechazar o no mi hipótesis, que es que el cabeceo les reduce el costo de transporte”, dice. “Si se reduce el costo de transporte con el cabeceo podemos empezar a concebir los dinosaurios moviendo la cabeza. Steven Spielberg tendría que remasterizar todas sus películas”, aseguró.
Si la hipótesis se rechaza, de todas maneras, podrá seguir experimentando qué pasa si le agrega más o menos peso a la cabeza, pudiendo hacer robots más eficientes. “Eso es lo bueno de juntar la biología y la ingeniería. La ingeniería nos entrega herramientas para poner a prueba hipótesis biológicas como el terópobot, pero la ingeniería se puede aprovechar de todo esto para inspirarse y hacer robots más eficientes”, dijo.
El profesor de biomecánica animal pretende seguir intentando resolver preguntas relacionadas con el vuelo del murciélago, el colibrí, las aletas de los pescados, las patas de los caballos o la cola del guepardo, pero con robots. Esto podría ayudar a hacer robots inspirados en la naturaleza que pudieran, por ejemplo, caer parados como un gato o moverse como el guepardo.
Para Grossi el trabajo conjunto de múltiples disciplinas es clave para obtener mejores resultados. “Muchos de mis alumnos terminaron ayudándome, gente del laboratorio, ingenieros eléctricos, mecánicos, diseñadores, para mi fue esencial tenerlos en mi equipo y espero tenerlos en el futuro”, señaló. “Los ingenieros por un lado pueden llegar a una meta, los biólogos por un lado vamos a llegar a otra, pero si nos juntamos llegamos a una meta mucho más larga, mucho más ambiciosa y eso es lo importante”, subrayó.