


Una exitosa jornada virtual, que reunió a autoridades de las instituciones convocantes, a los tres equipos ganadores del Autónomo Mobility Challenge y a participantes de diferentes lugares del mundo, se llevó a cabo este jueves en el Webinar “Desarrollo y proyecciones de la Movilidad Autónoma”.
La instancia contó con palabras de la ministra de Transporte y Telecomunicaciones, Gloria Hutt, a través de un video, quien destacó el Demo Day como una instancia para adquirir conocimiento alrededor de la buena experiencia que se tuvo con el vehículo autónomo en el Parque O’Higgins. Un trabajo colaborativo que ha permitido levantar un Hub de conocimiento en esta materia en el país y que esperan compartir con el resto de los países de la región.
También estuvo presente la representante del Banco Interamericano de Desarrollo (BID) en el país, Florencia Attedemo-Hirt, quien expresó: “La movilidad autónoma promete mejorar la seguridad y la eficiencia del transporte, además promete reducir la congestión y liberar importantes espacios públicos que hoy día son estacionamientos. Lamento decir que, un año y medio más tarde, cuando aún estamos sintiendo los efectos del COVID, el uso de la tecnología se ha acelerado de manera muy vertiginosa y nos ha demostrado que existen aún más posibilidades y oportunidades que las que nos imaginamos hace un año atrás”.
Por su parte, el decano de la Facultad de Ciencias Físicas y Matemáticas, Francisco Martínez, rescató lo importante que es para la Universidad de Chile participar en esta iniciativa, donde convergen diferentes disciplinas del conocimiento, agregando que “se vinculan aquí dos elementos: la electromovilidad y los vehículos autónomos. Ambos son muestra de la inmensa revolución tecnológica que estamos enfrentando”.
Futuras experiencias de movilidad autónoma en la industria
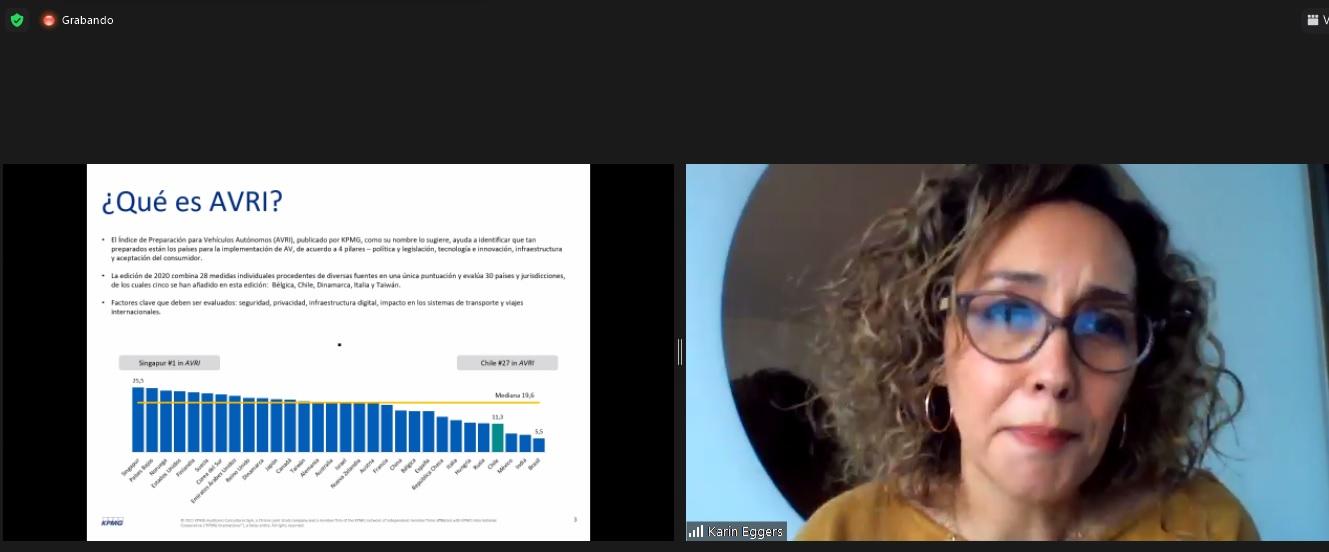
Luego fue el turno del panel de discusión denominado “Futuras experiencias de movilidad autónoma en la industria”, donde participaron Bárbara Silva, directora ejecutiva de Israel Council; Javier Ruiz del Solar, director ejecutivo del Centro Avanzado de Tecnología para la Minería (AMTC); Karin Eggers, directora de Sostenibilidad de KMPG; y Cristian Navas, especialista senior División de Transporte BID.
Karin Eggers se refirió a los diferentes pilares que son necesarios de considerar a la hora de incorporar los vehículos autónomos, sus aspectos positivos y negativos, lo que dio paso a la discusión del panel de expertos.
Según señaló, hay otros países que tienen temas de desigualdad más resueltos, por eso la adopción de esta tecnología no representa tanta complejidad como para nuestra sociedad.
“Estamos viviendo en el país y en el continente más desigual del mundo, que es Latinoamérica y en particular Chile, que es el segundo país más desigual dentro de la OCDE. Por lo tanto, también tenemos otros desafíos que también abordar”, indicó Eggers.
Para Javier Ruiz del Solar, es importante remarcar el contexto de esta tecnología que, bajo su conocimiento, se desarrolla en ambientes digitalizados, por lo que aún está lejos de que los vehículos personales se popularicen.
“En países como Chile nos falta innovación tecnológica propia y también nos falta capital humano para este desarrollo y uso apropiado, infraestructura o financiamiento, enfatizó.
Respecto al diseño de políticas públicas en este ámbito, Cristian Navas del BID, expresó que, dado que es un tema amplio, debe abordarse como un todo. “Vamos a estar trabajando con el MTT en una regulación de esta tecnología como una primera aproximación para generar las líneas que puedan permitir, en un futuro, tener una regulación que se adapte a las condiciones de, por un lado, tener reglas del juego claras y, por otro, no cuarten la tecnología”.
En la jornada también participó el profesor Williams Calderón, director del Centro de Aceleración Sostenible para la Electromovilidad (CASE), iniciativa interinstitucional financiada por Corfo, quien anunció la incorporación del AMTC a las líneas de investigación. También se sumarán los tres emprendimientos ganadores del Mobility Challenge: Sim AV+, Dual Vision ANA y TMR SYSTEM.
También participó Hernán Berríos, gerente general de Transdev, quien aseveró que “para nosotros, como compañía, fue un exitoso proyecto, ya que instalamos a Chile en el mapa mundial de la autonomía y pudimos ejecutar uno de los pilotos más importantes que ha tenido Transdev Group a lo largo de su historia”.
Emprendimientos ganadores
Tras meses de trabajo los equipos presentaron sus propuestas nuevamente, dando a conocer los avances durante este tiempo.
Sim AV+ desarrolló un software para la planificación on demand de vehículos autónomos, con el que se buscará evaluar el impacto del diseño de un sistema de vehículos autónomos para usuarios de transporte y operadores. Esto se realizará con un software de planificación que reduzca los costos de operación y maximice el servicio ofrecido a los usuarios. La integración de sistemas on demand permite mejorar la competitividad en el mercado con respecto a sistemas de transporte convencionales.
Dual Vision ANA se trata de un software de videoanalítica, el cual puede adquirir, procesar y analizar imágenes de video y sonido obtenidas en el interior del transporte autónomo, para generar un sistema de alertas respecto a comportamientos anómalos de usuarios a bordo, permitiendo reaccionar de forma efectiva ante posibles malos comportamiento o situaciones de riesgo
TMR SYSTEM propone incluir en el vehículo un ‘logger TMR’ embebido. De esta forma, a través de beacons, es posible saber la posición del vehículo en lugares donde no hay cobertura, como es el caso de túneles, subterráneos y lugares rurales de mala cobertura o zonas con mala señal en zonas urbanas.